2号站受制于技术、成本和需求 自动驾驶传感器融
长安汽车首款基于全新EPA1纯电动平台打造的产品——深蓝SL03公布了售价。深蓝品牌首款车型甫一亮相信息量不小,其智能驾驶传感器配置便十分吸睛。资料显示,深蓝SL03率先在国内采用4枚角雷达、1枚4D成像毫米波雷达组成的“360度”感知组合,且这总计5枚雷达均来自自主供应商。
作为感知元器件,4D毫米波雷达逐渐走热。这个领域曾是博世、大陆、安波福、电装等国际知名一级零部件供应商的天下。自主供应商最近几年也纷纷开始布局,华为、恒润经纬、华域汽车、森思泰克、楚航科技等公司的相关产品先后进入量产阶段。“当前,自动驾驶传感器相继量产落地,同时仍然不断演进,将逐渐成为汽车标配。”轻舟智航感知负责人张雨告诉《中国汽车报》记者。
一面是整车积极配装4D毫米波雷达,国内外供应商不约而同发力;一面是激光雷达逐渐发展成熟,成本降低,开启前装定点。不同类型传感器竞相登场,究竟是“内卷”还是一场“盛宴”?面向高等级自动驾驶,传感器融合方案路向何方?
传感器融合:互补而非替代
据了解,4D毫米波雷达在保有传统雷达低成本、高性能优势的同时,能够进行垂直方向探测;此外,虚拟天线技术的应用更使其在提高角分辨率、缩小体积等方面实现了突破。以大陆集团发布的4D成像毫米波雷达ARS540为例,该产品探测范围达300m,探测视野达±60°,可对各种类别交通参与者及固定设施准确分类。
“4D毫米波雷达与激光雷达的关系是互补而不是替代。从目前主流的传感器组合配置来看,2号站铸锻件零部件有单摄像头、1R1V、5R1V、5R6V,也有稍微激进一些的,比如6枚雷达、8枚摄像头和3枚激光雷达。这些配置是行车系统的基本组合,泊车系统的主流配置则是12枚超声传感器和4枚摄像头。”大陆集团自动驾驶及出行事业群中国区研发总监周勇告诉记者,“作为Tier1,满足不同客户的不同需求是我们的使命,公司拥有多样化的解决方案。”
“4D毫米波雷达和激光雷达在一定时期内会是共存的关系。”北京主线科技有限公司前瞻研究院院长王超认为,“4D毫米波雷达与传统毫米波雷达相比,点云质量有所提升;但与激光雷达相比,目前依然是后者占据绝对优势。对于这两种感知元器件而言,4D毫米波雷达胜在成本、稳定性与高效,激光雷达则胜在数据质量。它们都处于发展阶段,未来的形态及应用还存在很多变数。比如,行业注意到4D毫米波雷达的成本优势,就开始选择其以降低自动驾驶方案的成本。而假设激光雷达未来成本大幅下降,在极端天气下的表现更为稳定,激光雷达取代4D毫米波雷达也并非没有可能。”
“在相当长的一段时间内,目前主流的摄像头+毫米波雷达+激光雷达的配置组合应该不会改变。主要原因在于,每种传感器都有自身的优势、劣势及适用场景,它们兴起与迭代是为了达到更高的安全性,提供更多的安全冗余。摄像头可以捕捉颜色信息,毫米波雷达针对恶劣天气有很好的适应性,激光雷达的优势在于不受外界光线干扰,同时测距精度高,能够补足强光、逆光、黑夜等其他传感器弱势场景。”图达通(苏州)有限公司总经理邓常敏向记者介绍道,“随着L3及以上自动驾驶技术的规模化商用,激光雷达的使用量会继续增加,出现1颗、2颗,甚至4颗的多样性趋势。高性能激光雷达开始逐步被车企采用并加入融合感知的方案中,终极目标是为了使感知方案更加安全可靠。”
“4D毫米波雷达与激光雷达之间并不是替代关系。”楚航科技创始人、首席执行官楚詠焱告诉记者,“对于L2自动驾驶,4D毫米波雷达能够防止因高度信息误判产生的误报警、误制动,从而更好实现FCW(前方碰撞预警)和AEB(自动紧急制动)功能;对于L3~L5自动驾驶,能够与摄像头、激光雷达等以光学为基础的感知元器件更好地前向融合并提高鲁棒性,应该算是各司其职。”
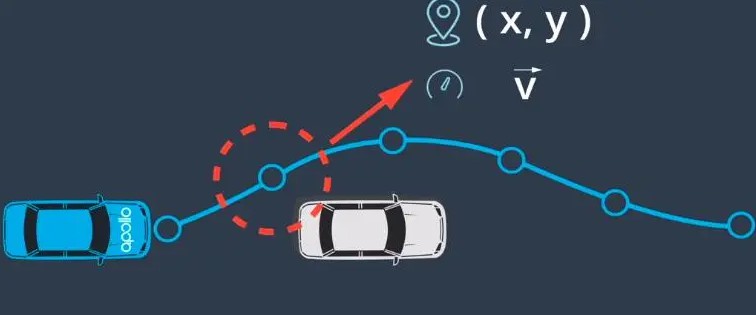
张雨补充说:“激光雷达可以提供精确的3D位置信息,不受环境光影响;毫米波雷达能够输出物体运动状态,对雨、雪、雾等恶劣天气鲁棒性强;摄像头信息密度高,对远距离/小物体/通用语义效果更好;超声波雷达成本低,自车米级别范围精度高,能够在倒车/泊车场景中起重要作用。”
组合方案源于技术等级需求
“对感知元器件的选型、布置和使用,我们应从L3、L4高阶自动驾驶的需求进行反向推导。”周勇的观点旗帜鲜明,而行业内持有类似看法的人士不在少数。
“感知元器件的选型、搭配应该基于对自动驾驶需求的匹配,不同等级的自动驾驶对感知的需求是有巨大差异的。不过,现在有两个略显尴尬的问题,一是通常我们并不能做到完全依据系统需求,寻找能够完美匹配的传感器,而是要采用现有的主流传感器;二是业界对于L3、L4自动驾驶的需求暂时还没有形成比较一致的清晰定义。”王超告诉记者。
“理想状态应该是基于整车自动驾驶需求的适应性来确定感知元器件,2号站铸锻件零部件也就是产品到底定位于实现哪一个等级的自动驾驶。”周勇分析认为,“对于L1、L2自动驾驶,单摄像头或1R1V的配置就足够了,但如果面向高等级自动驾驶,当前的传感器组合方式及数量,仍有可以进步的空间。因为每一类传感器都有自己鲜明的优势与劣势,这是由其工作原理决定的。比如,摄像头在夜间表现、纵向测距方面有短板;同样的,毫米波雷达、激光雷达也有自己的问题。既然我们追求在更多场景下实现自动驾驶,那么多种感知元器件融合就变得顺理成章了。”
邓常敏认同这种说法:“不同场景的需求不同,L2及L2+自动驾驶功能相对不复杂,可能只需要毫米波雷达和摄像头即可;但L3及以上自动驾驶,依靠更高性能的传感器加入,如目前主流的摄像头+毫米波雷达+激光雷达方案。”
周勇表示,从趋势上看,单车传感器的数量逐步增加,这有利于近距离补盲。比如,5R1V的组合还存在一定的盲区,车企于是开始考虑增加配置,将毫米波雷达增加到7枚的水平。同时,随着毫米波雷达的大规模量产,单个传感器的成本也在逐渐降低。
在张雨看来,在量产自动驾驶汽车上,激光雷达将从无到有,从少到多,直至全视角覆盖。“当前,我们处在从无到有的阶段,激光雷达的成本已降至可以量产的水平,但如果进行全视角覆盖依然面临两方面的限制。第一是成本,达到全视角覆盖需要5个左右的固态激光雷达支持,一定会造成成本的增加。第二是算力,全视角覆盖意味着大量点云数据需要计算处理,当前量产算力平台能否满足要求以及算力的机会成本都是需要考量的因素。”他对记者表示,“目前,单颗120°激光雷达足以应对绝大部分复杂场景,因此,其搭配全视角视觉及其他传感器,是满足城市NOA(导航辅助驾驶)的最优选择。”
“就目前的ADAS而言,现有解决方案即摄像头+毫米波雷达已能满足需求,加入4D毫米波雷达应该算是锦上添花。而对于L3及以上级别自动驾驶,这类传感器就是必选项。”楚詠焱指出,“不过,如何配置感知元器件,仁者见仁、智者见智。不同整车企业的品牌定位不同,即便相同品牌不同级别车型的定位也不同,这就带来感知元器件组合的不同方案。依据自动驾驶的需求以及品牌、产品定位确定配置是比较理性的选择。”